")
")
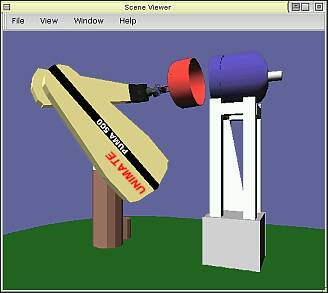
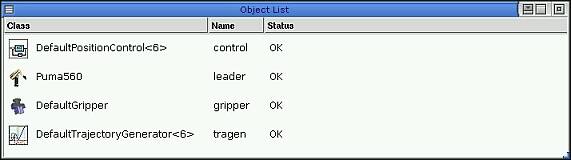
The Robotic Platform is an object-oriented robot programming system. All components (i.e., graphical user interface, 3D simulation, servo control, trajectory generation, task programming, and sensor integration) are integrated in one homogeneous class design. All components run on a single PC, on a single operating system, the QNX Real-Time Platform. The system allows for generic programming (e.g., manipulator independent programming). Extensions integrate seamlessly into the graphical user interface and the 3D simulator. The 3D simulator dynamically adapts to the robot control program, using Open Inventor and VRML 3D model files.
| Project Date | 1999 - 2001 |
|---|---|
| Customer | Clemson University, USA |
| Operating System | QNX 6.2 |
| Hardware | Real-time, Open Inventor, motion control cards, Puma manipulators, WAM manipulators |
| Programming Environment | C++, GNU |
| Technologies | Real-Time Software, Embedded Control, 3D Graphics (Open Inventor, Open GL), Robotics |
| Impact | Flexible object-oriented robot control on a single PC system |
| Publications |
Journal Papers: |
Screenshots